Remote Handling (ITER)
ITER, “International Thermonuclear Experimental Reactor”, is a large-scale scientific experiment that aims to demonstrate that it is possible to produce commercial energy from fusion. Some parts of the reactor will become too “hot” to handle and to be maintained by hand and therefore it is done remotely.
Challenge
Remote controlled manipulators can be used to perform maintenance according to validated procedures. Proper visual and haptic feedback through cameras and manipulator arms are important factors in achieving transparent control over the maintenance process. The Remote Handling Systems (RH) under design for ITER can benefit from experience with RH techniques developed at JET, “Joint European Torus”. Full scale hardware mockups are expensive to build a may rapidly become outdated due to design changes.
Solution
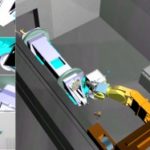
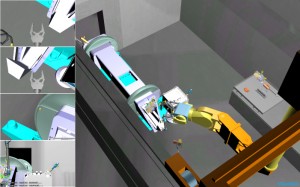
In cooperation with the FOM Institute DIFFER, HIT has developed an Interactive Task Simulator and a multi-operator RH Control station, in which we can develop, test and validate RH maintenance procedures in a Virtual Reality context. The system includes a physical simulator to simulate remote maintenance with realistic contact interaction. Using a haptic master arm and force feedback control, the simulator can provide realistic situation force feedback to the operators. The interactive simulation is instrumental in validating realistic maintenance scenario with remote handling.
Contribution HIT
Heemskerk Innovative Technology (HIT) has developed and tested novel interactive simulator technologies and RH control strategies for the Remote Handling Study Centre located at the FOM institute DIFFER in Eindhoven. HiT actively supports DIFFER in developing a Remote Handling compatible design for the Electron Cyclotron Heating Upper Launcher.
Information Technology (IT) has played an important role in several development projects under ITER-NL WP3 – Hot Cell Remote Handling Equipment. HIT provides direct support to the ITER Remote Handling Section in development of Remote Handling Control Room Technologies (Synthetic Viewing) and in direct support through contract with F4E (“Fusion For Energy”, the European Union’s Joint Undertaking for ITER) on RH control room standard parts. HIT also works with FOM Institute Differ on making ITER diagnostic systems and port plugs compatible with Remote Handling.