Remote Handling Analysis Components (ITER)
Focuses on the maintainability of components of ITER, at the back of the port plug and parts of the port plug itself, such as the mirrors.
Challenge
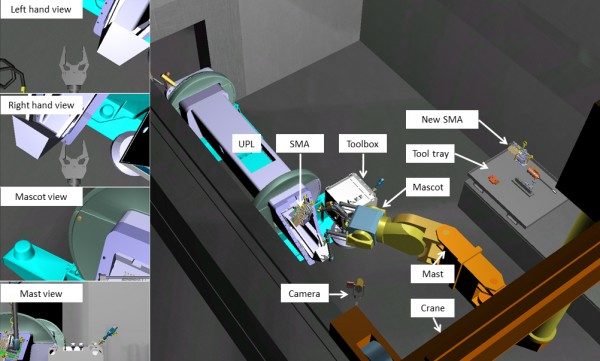
The maintenance and repair of the ITER Electron Cyclotron Resonance Heating Upper Port Plugs (parts of ITER). This high performance system should be maintained through robotic systems, where DIFFER and HIT collaborate with the design team to make the design suitable for Remote Handling (maintenance from a distance).
Solution
The design has Remote Handling features integrated and structural interface is designed to give a statically defined assembly. Movements are designed to deterministic control the bodies to prevent interference and jamming. The remote procedures are validated by using the simulation system at the Remote Handling Study Centre.