Interactive Task Simulator (ITS) – development and evaluation
BSc/MSc Student Assignment ITER
Introduction
During ITER maintenance shutdowns, the maintenance crews work for several months in 24/6 shifts, inspecting and replacing worn and broken components, all to bring the experimental ITER reactor back into an operational state as soon as possible. The level of contamination (with toxic materials) and activation (yielding high dose rates gamma radiation) of Tokamak components imply that many of these maintenance activities have to be done by Remote Handling (RH), using master / slave manipulators, cranes and automated transport containers. The more delicate and precise maintenance operations will be done by dexterous haptic telemanipulation systems.
In order to reduce the maintenance interval, maintenance activities will be performed in parallel at several locations, such as at various levels on the inside of the Tokamak, in the Neutral Beam Hot Cell, in the Cask Transportation System and throughout various work stations in the ITER Hot Cell Facility. All Remote Handling operations are coordinated and controlled from a High-level Control Room. Up to twelve workstations with up to four operators each are foreseen. Each workstation is typically equipped with one or two master arms to directly control dexterous slave manipulators. In order to preserve flexibility in allocating master control stations to specific slave robots, middleware makes it possible to establish flexible real-time connections between different master and slave devices.
In our RHSC (Remote Handling Study Centre) we couple master devices, to a virtual slave device as will be implemented in the ITER facility.
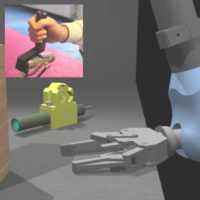
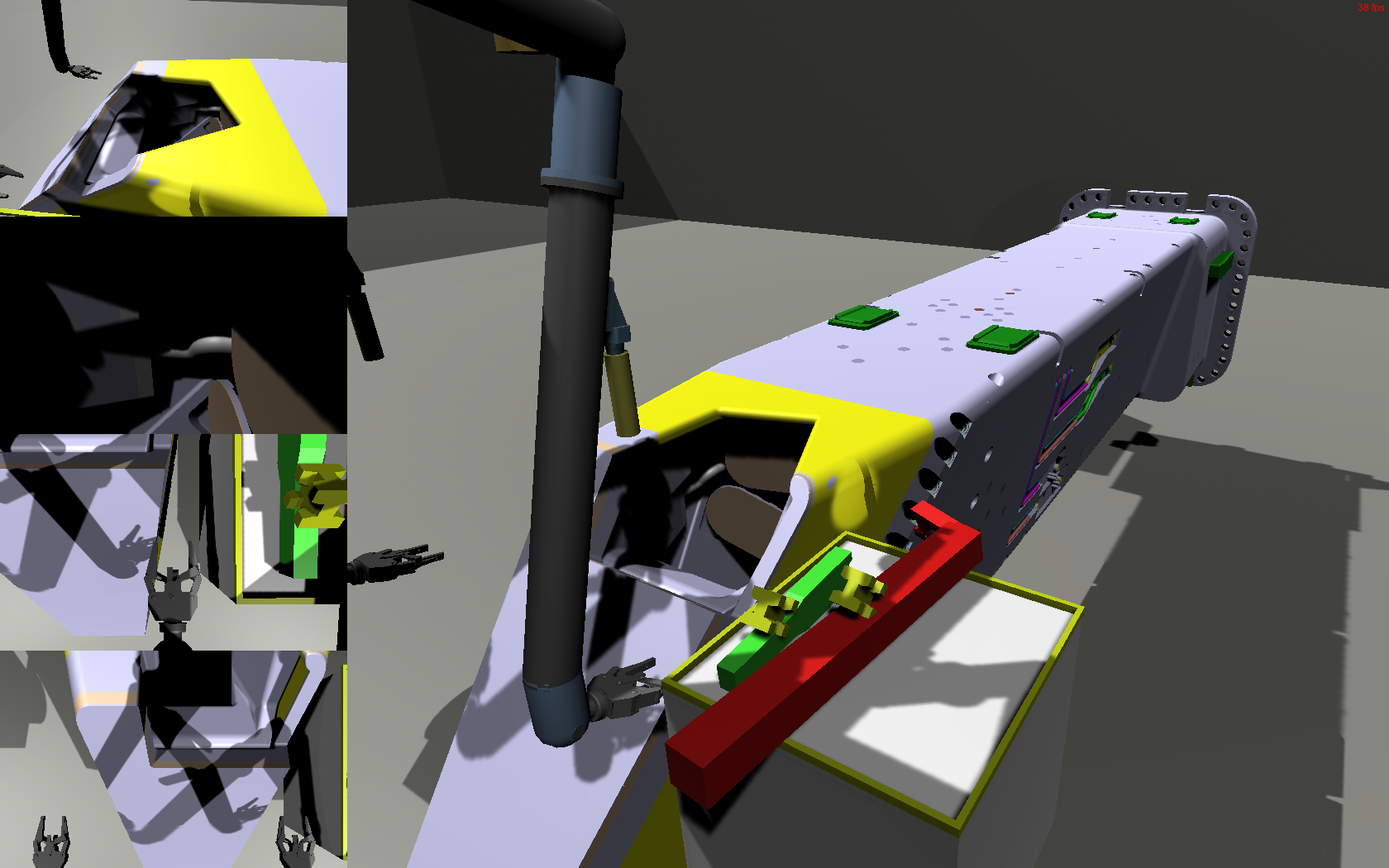
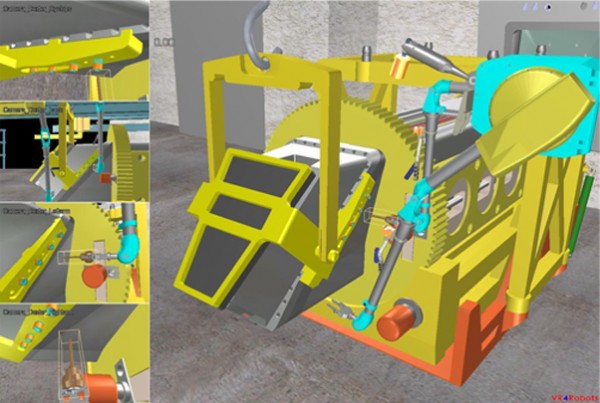
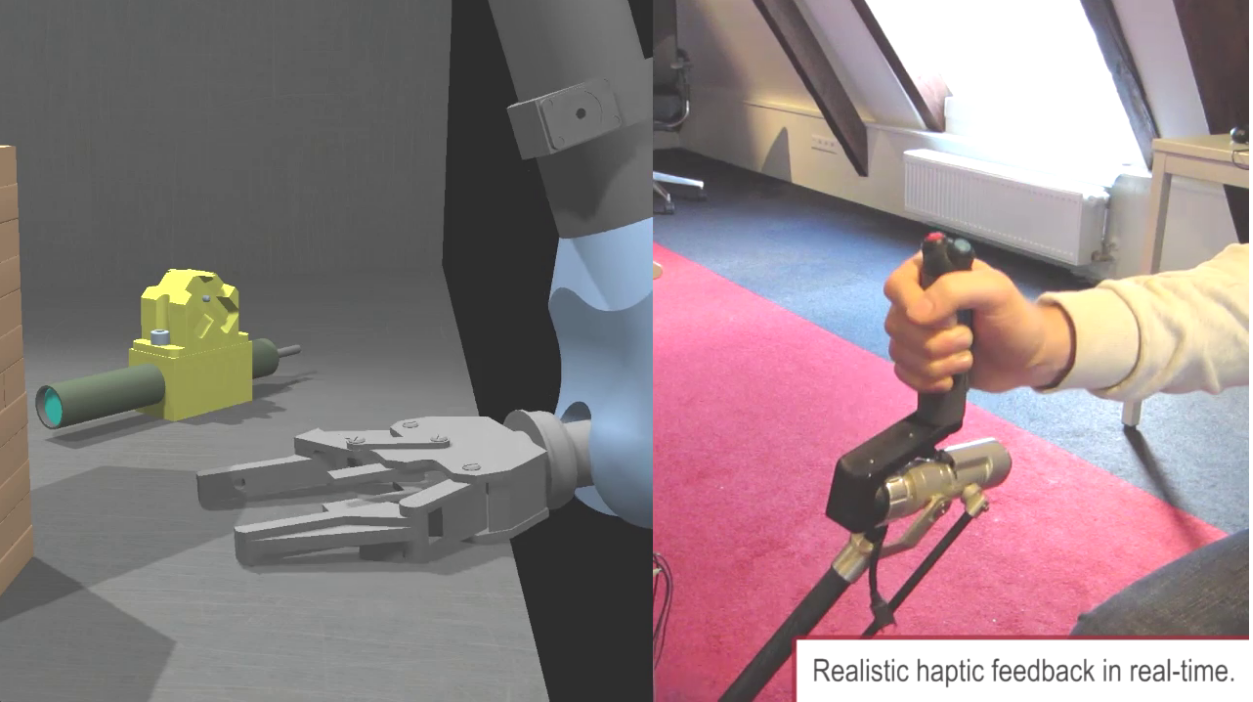
With ITS, the Interactive Task Simulator, remote maintenance studies are performed. ITS simulates a mechanical slave arm and its environment in soft real-time, using the NVidia PhysX SDK to simulate the physical interactions and dynamics. ITS is programmed to interface with master devices and a virtual reality system using Unity. The software allows users to interactively control the simulation using real master devices, including the force feedback from the simulated environment.
Project
A lot of testing and validation of HIT work is done using an in-house built simulator: The Interactive Task Simulator (ITS). This simulator allows us to evaluate the remote handling of models for example for ITER. ITS is based on the Nvidia PhysX engine. Advancements in these physics engines allows us to create more complex and more detailed simulations. However, the PhysX engine is heavily intertwined with all the layers of the simulator. This means that keeping the simulator up-to-date with recent software updates takes considerable effort. An update of the gaming environment is in fact not always necessarily an improvement for our real time haptic simulator. As such, these updates need to be validated to ensure our findings are realistic. For this reason, we are looking for interns/students to implement and validate (small) engine changes. In this project we are looking for someone with (relative) extensive experience in C++ and preferably hands-on experience with 3d CAD software such as 3ds Max.
Expected output:
- Demos of work in various (later to be defined) tasks
- Standalone executable of a fully functional demo
- Qualitative analysis of new different SDK’s, running the simulation.
Requirements:
- Excitement about new technologies, eager to work on state-of-the-art technologies;
- Independence, research appetite, enthusiastic, self-critical;
- Sense of responsibility, duty fulfillment;
- Eager to work in an international environment, team-player, collaborate with multiple institutions and companies, determined to dedicate time in the project, able to set priorities;
- Basic understanding of math and programming (C++, Python, MATLAB);
- Basic understanding of 3d software (3ds max).
What do we offer?
- International environment;
- Hands-on experience with robotics in the face of real-life challenges;
- State-of-the-art hardware (e.g. haptic simulator, care robot, etc.)
- Bi-weekly progress meetings;
- A daily supervisor to provide guidance if needed.