Virtual Slave System (Dutch Space)
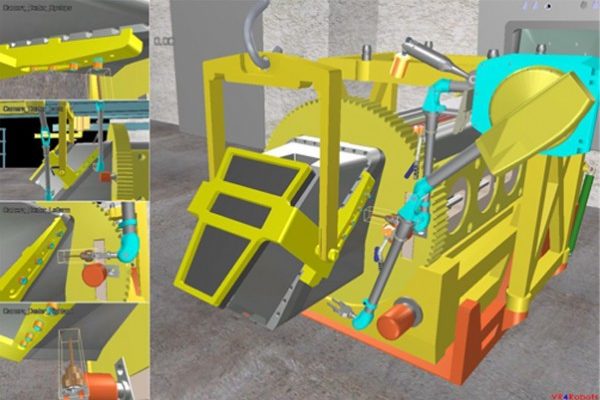
Development of a simulation tool that can simulate surroundings and designs that are imported from CAD software.
Challenge
In Remote Handling there are lots of awkward viewing angles. The robot arms can’t be everywhere, parts are sometimes surprisingly heavy or get stuck. Such inconveniences are often only discovered when you try something in real life. After that changing your design is often expensive and slow. What if you could already do all these practice tests during the design process?
Solution
By linking with real control devices simulation software we can perform maintenance tasks virtually. For this we only need 3D models. The physical behavior of components is calculated, so fast that the user can actually feel touch, weight and friction. The software that enables this is called the Virtual Slave.
Application
The application of the Virtual Slave is versatile, the ITS is suitable for use during the design, validation of maintenance, training operators and operational support during the execution of maintenance activities.
Contribution HIT
Within the Virtual Slave project a consortium of Dutch Space, Heemskerk Innovative Technology and Tree C focuses on the development of a simulation tool that can be used. Besides the kinematics also the dynamics and physical interaction imported from CAD programs and designs simulated environments.